Robot's Choice: Scavenger Robot
Directed by Chenxiao Wang
Position: Character Lead and Producer
Software used:






Fig.1: Silhouette thumbnails and set driven key plans for a saw transformation.
The big robot, Ares is a scavenger robot that disassembles other robots for their body parts and energy to sustain its life. This character is branded as a villain in the story. The keywords for this character include:
●Unbalancing, inverted triangles.
●Extra arm.
●Human shape with monster elements.
●Humanoid machine style.
●March of Robots style.
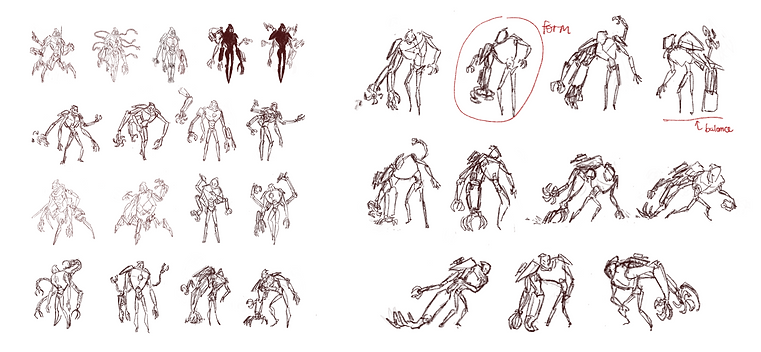
Fig.2: Silhouette thumbnails 2.


Fig.3: Character Moodboards.

Fig.4: Modeling progress.
Since I joined the project three months after it started, the team required the 3D model for layout immediately before the design was set. So, the design was changed drastically during the modeling process.
The character was created in Autodesk Maya, but I moved to Blender to continue modeling for the Blender modifiers.
Reference used: Pacific Rim, Transformers, Short Circuit.
Modifiers used: Box cutter, HardOps.
The character's backstory played a significant role in guiding design decisions, particularly in maintaining the use of rectangular shapes. Originating as a regular robot that has gained a mind of its own, its survival instinct made it a scavenger to acquire energy to sustain its life. As a result, the team decided to make the shapes more angular instead of using triangular bases to create a more menacing character.
After examining the design, it was decided that the chest area in the first version was overly complex and detracted from the key features, such as the claws and the light on the chest. The chest design was simplified to ensure these features stood out effectively, achieving a better balance among the various components.
Scavenger Robot (greyscale)
Scavenger Robot (wireframe)
Scavenger Robot (texture)<-Carlton Lee (Lee Ho Yin)

Fig.5: Scavenger Robot in Blender.

Fig.6: Scavenger Robot (greyscale).

Fig.7: Scavenger Robot (wireframe).

Fig.8: Scavenger Robot UV.
Due to the amount of components, it posed a challenge to arrange the UV shells based on the material so it was arranged based on body parts.

Fig.9: Character Sheet.
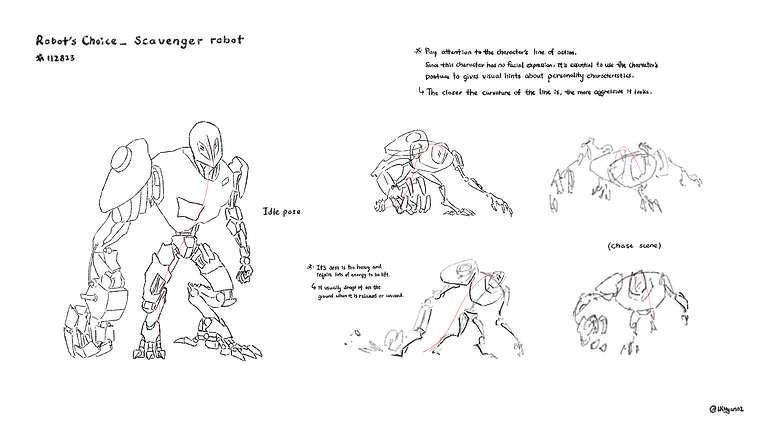
Fig.10: Character Posing and notes for animators.

Fig.11: A sketch regarding character posing and camera changes in the film.

Fig.12: Texture Research.

Fig.13: Texture Plan.

Fig.14: Texture painted in Substance Painter by Carlton Lee (Lee Ho Yin).
Scavenger Robot Rig video

This saw transformation sketch illustrates how the component's parts need to move against each other at different values in the channel box.
Reference: Transformer Rigs.
The last component can extend and extract from the base mesh, but the way that mesh pops out from the base is not aesthetically pleasing. Therefore, a poly split method was experimented with to gradually transform the mesh out from the base.
To achieve this effect, a slice with the multi-cut tool needs to be added to the very edge of the mesh. When the attribute value of the cut plane history is changed, the faces should be able to become invisible from the selected plane angle gradually.
Fig.15: Saw transformatino plan.


Fig.16: Poly-split experimentation.
Fig.17: Location of the saw.
However, after experimenting with polysplit animation, it was found that a gradual transition cannot be achieved when there are multiple edges on the mesh without coding. As a result, the idea was abandoned, and the component was left to emerge entirely from the base instead due to the lack of production time.


Fig.19: Big robot’s control location and attribute options
The control with this saw transformation was applied to the right shoulder saw control, and there are three main attributes that control the movement of the saw.
Fig.18: Saw transformation.

The control with this saw transformation was applied to the right shoulder saw control, and three main attributes control the saw's movement.
Since a transformation attribute controls the animation of the saw transformation, another attribute has been added to turn the saw transformation rig on and off so that the rig can switch to using Fk or Ik.
Fig.20: Saw transformation attributes.
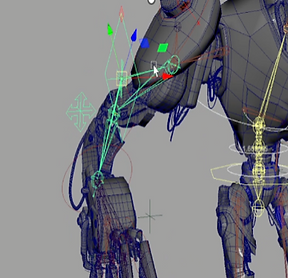
Fig.21: Extra arm control that help reduce collision .
Since the big robot's right arm is made up of different components with varying degrees of movement, the meshes may collide or rotate at awkward angles.
To reduce collision, an additional rectangular shoulder control has been incorporated to regulate the angle of movement for the arm components.
After adjusting the shoulder control, the elbow control also needed to be fine-tuned to minimize mesh collisions. This approach not only ensures believable movement of the components but also allows animators to animate a sense of weight and drag for the arm.
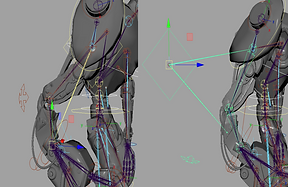
Fig.22: Structure of the extra arm control.
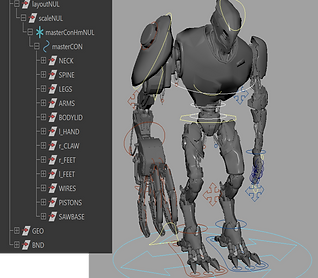
Fig.23: Scavenger robot rig.

Fig.24: BND joints and joints with controls.

Fig.25: Camera change based on previous sketches.

Fig.26: Film Production Schedule.